

This lower-power, smaller, and lower-cost version of the TReX is the ultimate general-purpose motor controller for small motors: it has a wide operating range (5 to 24 V), delivers 2.5 A continuously per motor, provides current sensing on the two main channels, and it features the TReX triple interface that allows you to control motors from a serial line (RS-232 or TTL), radio control (RC) receiver, or analog voltage source such as a potentiometer.
The TReX Jr Dual Motor Controller, a lower-power version of the TReX Dual Motor Controller, is a versatile DC motor controller designed to seamlessly blend autonomous and human control of small robots. The TReX Jr can control two bidirectional and one unidirectional motor via three independent control interfaces: radio control (RC) servo pulses, analog voltage, and asynchronous serial (RS-232 or TTL). Using the compact MC33887 motor driver allows for a single-board design that reduces cost while maintaining a small package. As an added benefit, the use of the MC33887 motor driver allows operation to 24 V.
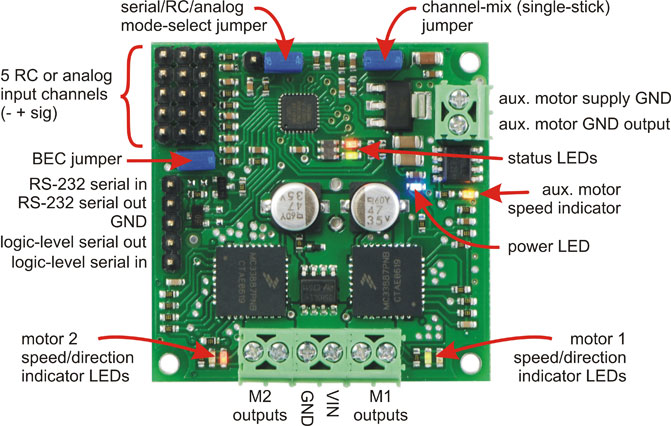
The TReX Jr uses five input channels to receive the RC or analog control signals. When operating in RC or analog mode, the five channels function as follows:
The serial interface can switch instantly with one of the other two interfaces, allowing mixed autonomous and remote control. For example, a robot could be configured to run autonomously most of the time, but a human operator could override the autonomous function if the robot gets stuck or into a dangerous situation. If the serial mode is selected as the primary interface, high-resolution measurements of all five channel input signals (be they RC pulses or analog voltages) are made available to the autonomous robot controller, allowing for complex and unlimited mixing of operator control and sensor input. For example, the TReX would be a great motor controller for a remotely controlled balancing robot.
 |
|
Pololu TReX Jr Dual Motor Controller with labels |
|---|
Technical specifications
| Dimensions | 1.75" x 1.75" x 0.5" (0.3" height without connectors) |
| Supply voltage | 5 – 24 V |
| Primary motor outputs | 2 bidirectional, 5 A peak, up to 2.5 A continuous (may be combined to control 1 bidirectional, 5 A continuous) |
| Auxiliary output | 1 unidirectional, 10 A continuous |
| Speed control | 128 steps in each direction |
| Control interfaces | RC servo pulses, analog voltages, or serial commands; master interface set by mode-select jumper |
| Input channels | 5 (RC servo pulses or analog voltages) |
| RC pulse measurements | 12-bit resolution, 1 us accuracy |
| Analog measurements | 10-bit resolution |
| Serial interface | both RS-232 and TTL (logic level), bidirectional |
| Baud rates | supports 11 common baud rates ranging from 1200 to 115,200 bps |
| Expanded protocol | Allows multiple Pololu servo and motor controllers on one serial line |
| Compact protocol | Allows both motors 1 and 2 to be simultaneously set with just three bytes |
RC/Analog control features
Options accessable through the serial interface
Safety features
Note: The TReX Jr does not require use of the serial interface to function; it will work right out of the box as an electronic speed control (ESC). You will not have access to the full suite of features the TReX Jr provides if you do not make use of the serial interface, though.
 |
|
24" (600 mm) female-female RC servo extension cable. |
|---|
Servo cable accessories
The TReX Jr has male 0.1" headers; for direct connection to an RC receiver or serial servo controller, we recommend ordering one 6" female-to-female cable, 12" female-to-female cable, or 24" female-to-female cable per channel you intend to use (the TReX Jr can use up to five channels).
Dimensions
| Size: | 1.75" x 1.75" x 0.5" |
|---|---|
| Weight: | 15 g |
General specifications
| Motor driver: | MC33887 |
|---|---|
| Motor channels: | 31 |
| Control interface: |
non-inverted TTL serial (2-way); RS-232 serial (1-way), RC servo pulses, analog voltage |
| Minimum operating voltage: | 5 V |
| Maximum operating voltage: | 24 V |
| Continuous output current per channel: | 2.5 A2 |
| Peak output current per channel: | 5 A3 |
| Continuous paralleled output current: | 5 A |
| Current sense: | 0.5 V/A4 |
| Maximum PWM frequency: | 10 kHz |
| Minimum logic voltage: | 2.7 V |
| Maximum logic voltage: | 5.5 V |
| Reverse voltage protection?: | Y |
Notes:
- 1
- Two bidirectional, one unidirectional.
- 2
- On primary channels.
- 3
- On the primary channels.
- 4
- Current readings are converted to a digital number from 0-255.
-
Documentation and other information
 Sample C# Program for Communicating with the TReX and TReX Jr(Printable PDF)
Sample C# Program for Communicating with the TReX and TReX Jr(Printable PDF)
This sample C# program (written for Microsoft Visual C# 2008) shows how you can use your computer to send and receive data from the TReX and TReX Jr motor controllers.
File downloads
- TReX Configurator utility for Windows version 100608 (295k zip)
- If you have the ability to connect your TReX to a computer (via serial port or USB-to-serial adapter), you can use this program to monitor the channel inputs, control the motor drivers, and configure its various settings. This version supports TReX and TReX Jr firmware versions 1.3 and below. Please manually uninstall older versions of the TReX Configurator before installing this version.
- TReX Jr command documentation (100k pdf)
- TReX Jr configuration parameter documentation (125k pdf)
- TReX Jr (DMC02) Firmware version 1.2 (161k trx)
- This firmware fixes a bug that affected the 38,400 and 28,800 bps baud rates, and it adds a configuration parameter that lets you optionally insert a 1 ms delay between the last byte of a received command packet and the first byte of the TReX Jr’s transmitted response. Without this delay, slower controllers, such as the Basic Stamp, can miss the first byte of the TReX Jr’s response.
- MC33887 motor driver datasheet (1MB pdf)
- Drill guide for Pololu TReX Jr Dual Motor Controller DMC02 (85k dxf)
- This DXF drawing shows the locations of all of the board’s holes.
Recommended links
- Arduino example code for the TReX
- This Arduino sketch, written by forum member mwomack, sets up a serial interface between the TReX and an Arduino and sends three basic data-query commands: “Get Signature”, “Get Mode”, and “Does Serial Control Motors?”. It can be used as a template for implementing additional commands.
- More Arduino example code for the TReX
- This Arduino sketch, written by forum member gcebiker, sets up a serial interface between the TReX and an Arduino and sends commands to drive motors in response to joystick inputs to the Arduino.
- Video of the RP5 Tracked Chassis Driven by the TReX Jr
- A video showing the RP5 Tracked Chassis as a radio-controlled platform driven by the Pololu TReX Jr motor controller.

Pololu 767 TReX Jr Dual Motor Controller DMC02
- Brand: Pololu
- Product Code: Pololu-TReX-Jr-Motor-Control
- Reward Points: 142
- Availability: In Stock
- रo 14,110.00
-
रo 11,948.00
- Price in reward points: 14224
-
- 2 or more रo 13,997.00
- 5 or more रo 13,883.00
- 10 or more रo 13,769.00
Related Products

L298N Motor Driver Board
The L298N driver module, using ST' L298N chip, can directly drive two 3-30V DC motor, and provide a ..
रo 195.00

L298P 2A Motor Shield For Arduino
This DFRobot Arduino Compatible Motor Shield (2A) uses L298P chip which allow to drive two 7-12V DC..
रo 1,183.00 रo 1,364.00

L298N - Dual Full Bridge Driver
The L298N is a high voltage, high current, dual full bridge driver designed to accept standard TTL l..
रo 150.00

L298 Dual H-Bridge Motor Driver
Double H driver module uses ST L298N dual full-bridge driver, an integrated monolithic circuit in a ..
रo 2,519.00

Stepper Motor Driver A4988
A4988 is a complete microstepping motor driver with built-in translator for easy operation. This pro..
रo 140.00

1A Motor Shield for Arduino
1A Motor Shield for Arduino This Motor shield for Arduino uses L293 chip which allow to dri..
रo 1,502.00 रo 1,730.00

Stepper Motor Driver - Easy Driver A3967
Each Easy Driver can drive up to about 750mA per phase of a bi-polar stepper motor. It defaults to 8..
रo 210.00

Pololu 2134 / 2874 DRV8834 Low-Voltage Stepper Motor Driver Carrier
This is a breakout board for TI’s DRV8834 microstepping bipolar stepper motor driver. It has a pinou..
रo 602.00 रo 628.00

Pololu 2971 DRV8880 Stepper Motor Driver Carrier
This breakout board for TI’s DRV8880 microstepping bipolar stepper motor driver features adjustable ..
रo 917.00 रo 955.00

Pololu Dual 2755/2756 MC33926 Motor Driver for Raspberry Pi
This add-on board enables a Raspberry Pi B+, A+, Pi 2, or Pi 3 to drive a pair of bru..
रo 2,802.00 रo 2,919.00

Pololu 1213 Dual MC33926 Motor Driver Carrier
This dual brushed DC motor driver, based on Freescale’s MC33926 full H-bridge, has a wide operating ..
रo 2,802.00 रo 2,919.00

Pololu 1212 MC33926 Motor Driver Carrier
This breakout board for Freescale’s MC33926 full H-bridge has an operating range of 5 – 28 V and can..
रo 1,512.00 रo 1,575.00

Pololu 2130 DRV8833 Dual Motor Driver Carrier
This tiny breakout board for TI’s DRV8833 dual motor driver can deliver 1.2 A per channel continuous..
रo 754.00 रo 786.00

Pololu 2135 DRV8835 Dual Motor Driver Carrier
This tiny breakout board for TI’s DRV8835 dual motor driver can deliver 1.2 A per channel conti..
रo 376.00 रo 391.00

Pololu 2511 DRV8835 Dual Motor Driver Shield for Arduino
This small shield is an easy, economical way to control two small brushed DC motors with an Arduino ..
रo 679.00 रo 707.00

Pololu 2990 DRV8838 Single Brushed DC Motor Driver Carrier
This tiny breakout board for TI’s DRV8838 motor driver can deliver a continuous 1.7 A (1.8 A peak) t..
रo 340.00 रo 354.00

Pololu 2961 MAX14870 Single Brushed DC Motor Driver Carrier
This compact breakout board for Maxim’s MAX14870 motor driver offers a wide operating voltage range ..
रo 754.00 रo 786.00

Pololu 2960 BD65496MUV Single Brushed DC Motor Driver Carrier
This compact breakout board for ROHM’s BD65496MUV motor driver offers an operating voltage range of ..
रo 1,071.00 रo 1,275.00

Pololu 2136 DRV8801 Single Brushed DC Motor Driver Carrier
This tiny breakout board for TI’s DRV8801 provides a modern alternative to classic motor drivers suc..
रo 1,044.00 रo 1,087.00

Pololu 1112 Qik 2s12v10 Dual Serial Motor Controller
This powerful motor controller allows variable speed and direction control of two large, brushed DC ..
रo 14,110.00

Pololu 1110 Qik 2s9v1 Dual Serial Motor Controller
This small, inexpensive motor controller allows variable speed and direction control of two small, b..
रo 3,551.00

L298 Dual H-Bridge Motor Driver Module
New L298 Dual H-Bridge Motor Driver Features: Working mode: H bridge ..
रo 235.00

Pololu 3113 A-Star 32U4 Prime SV
The A-Star 32U4 Prime SV is a programmable board based on Atmel’s ATmega32U4 microcontroller and arr..
रo 2,271.00 रo 2,365.00

ULN2003 Stepper Motor Driver Board
ULN2003 Stepper Motor Driver Board A B C D four-phase LED indicates the status of the ..
रo 74.00

Pololu 1392/1394 Jrk 21v3 USB Motor Controller with Feedback
The jrk 21v3 motor controller is a highly configurable brushed DC motor controller that supports fou..
रo 5,638.00 रo 5,873.00

Pololu 2968 / 2969 Stepper Motor Driver Carrier, Digital Current Control MP6500
This product is a carrier board or breakout board for the MP6500 stepper motor driver from Monolithi..
रo 520.00 रo 549.00

Pololu 2966 / 2967 Stepper Motor Driver Carrier, Potentiometer Current Control MP6500
This product is a carrier board or breakout board for the MP6500 stepper motor driver from Monolithi..
रo 527.00 रo 549.00

Pololu 707/708 VNH2SP30/VNH3SP30 Dual Motor Driver Carrier MD03A 708 707
The Pololu dual high-power motor drivers are compact carriers for the VNH3SP30 and VNH2SP30 motor dr..
रo 14,932.00 रo 17,634.00

Pololu 3142 / 3143 / 3146 / 3147 / 3148 / 3149 Jrk USB Motor Controller with Feedback
This compact motor controller makes closed-loop speed or position (but not both!) control of a brush..
रo 4,771.00 रo 4,970.00

Pololu 2133 / 2982 DRV8825 Stepper Motor Driver Carrier, High Current
This breakout board for TI’s DRV8825 microstepping bipolar stepper motor driver features adjustable ..
रo 1,286.00 रo 1,339.00
