

|
A |
B |
Range |
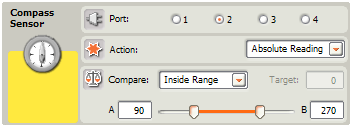
Absolute Heading |
Logical Value |
|
85 |
95 |
Inside Range |
90 |
|
|
85 |
95 |
Inside Range |
100 |
|
|
85 |
95 |
Outside Range |
90 |
|
|
85 |
95 |
Outside Range |
100 |
|


Sensor Register Layout
|
Address |
Type |
Contents |
|
00 – 07H |
chars |
Sensor version number |
|
08 – 0FH |
chars |
Manufacturer |
|
10 – 17H |
chars |
Sensor type |
|
18 – 3DH |
bytes |
Not used |
|
3E, 3FH |
chars |
Reserved |
|
40H |
byte |
Not used |
|
41H |
byte |
Mode control |
|
42H |
byte |
Heading } two degree heading |
|
43H |
byte |
Heading } one degree adder |
|
44, 45H |
word |
Heading (low byte, high byte) |
|
46 – 7FH |
bytes |
Not used |
- The HiTechnic compass sensor will only operate correctly in a horizontal plane so you must keep the compass level for it to read correctly. This is very important so remember this when you build it into your robot.
- NXT Firmware version 1.03 must be loaded in the NXT for the compass to operate correctly. You can check the firmware version by displaying the NXT Window in the Mindstorms software.
- It is highly desirable to mount the compass at least 6 inches (15 cm) away from the motors and 4 inches (10cm) away from the NXT brick itself.
- Try to make sure it is firmly mounted, if it bounces around, the readings may bounce around too.
Downloads
Lego Mindstorms Magnetic Compass Sensor for NXT / EV3
- Brand: HiTechnic
- Product Code:Hitechnic-Magnetic-Compass-Sensor
- Reward Points:76
- Availability:Order now and get it in 07 days
- रo 7,550.00
-
रo 7,385.00
- Price in reward points:7550
Related Products

Lego Mindstorm Acceleration / Tilt Sensor for NXT / EV3
Now you can make robots that know which way is up! The Accelerometer / Tilt Sensor measures accelera..
रo 6,920.00 रo 7,550.00
Lego Mindstorms Infrared Seeker V2 for NXT / EV3
Play robot soccer and zero in on your infrared (IR) beacons with IRSeeker. You can use most TV remot..
रo 6,920.00 रo 6,985.00

Lego Mindstorms Color Sensor V2 for NXT / EV3
Add a spectrum of color to your models with the new and updated Color Sensor. Detect an extended ran..
रo 6,920.00 रo 7,550.00

PICAXE I2C Explorer Kit AXE216
A self-assembly kit for the PICAXE-20X2 (included) for those wishing to interface and experiment wit..
रo 1,350.00

BrickPi+ Base Kit
BrickPi is best for someone who already has LEGO MINDSTORMS sensors and motors. The BrickPi connects..
रo 17,563.00
EV3 Infrared Beacon
This has been designed for use with the EV3 Infrared Seeker Sensor. The beacon emits an infrared sig..
रo 4,425.00

EV3 Infrared Sensor
The digital EV3 Infrared Seeking Sensor detects proximity to the robot and reads signals emitted by ..
रo 4,425.00

EV3 Color Sensor
The digital EV3 Color Sensor distinguishes between eight different colors. It also serves as a light..
रo 5,175.00 रo 5,885.00

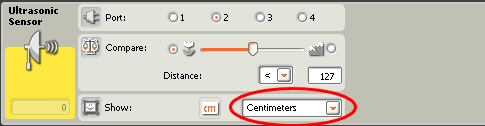
EV3 Ultrasonic Sensor
The digital EV3 Ultrasonic Sensor generates sound waves and reads their echoes to detect and measure..
रo 4,425.00

EV3 Gyro Sensor
The digital EV3 Gyro Sensor measures the robot’s rotational motion and changes in its orientation. S..
रo 4,425.00
Lego Mindstorms NXT Magnetic Sensor
The NXT Magnetic Sensor will enable you to build robots that can detect magnetic fields. The sensor ..
रo 2,865.00
Lego Mindstorms NXT IR Receiver Sensor
The NXT IRReceiver Sensor receives signals from a LEGO Power Functions IR remote control, decodes th..
रo 6,280.00

Lego Mindstorms NXT PIR Sensor
Detect people or pets with the HiTechnic PIR Sensor. This Passive Infrared Sensor is similar to the ..
रo 6,920.00
Lego Mindstorms NXT EOPD
Accurately detect objects and small changes in distance to a target with the HiTechnic EOPD. The EOP..
रo 6,920.00

Lego Mindstorms NXT Angle Sensor
Measure axle rotation position and rotation speed with the HiTechnic Angle Sensor. The Angle Sensor ..
रo 6,920.00
Lego Mindstorms NXT Force Sensor
The NXT Force Sensor will enable you to build robots that can measure a physical force applied throu..
रo 5,000.00
Lego Mindstorms NXT Barometric Sensor
The NXT Barometric Sensor can be used as part of a weather station or to monitor altitude. The senso..
रo 6,920.00

HiTechnic NXT Extended Connector Cable
Extend your Mindstorms NXT robotic designs with the HiTechnic Extended Connector Cable . Build creat..
रo 100.00

HiTechnic NXT Touch Sensor Multiplexer
HiTechnic NXT Touch Sensor Multiplexer for LEGO Mindstorms NXT Introduction The NXT Touc..
रo 3,610.00

HiTechnic 9V-6xAA Battery Box
This Battery Box can be used to power the 360 IR Beacon replacing the beacon's optional 9v internal ..
रo 645.00

HiTechnic NXT SuperPro Prototype Board
HiTechnic SuperPro Sensor for LEGO Mindstorms NXT Introduction The HiTechnic SuperPro Sensor..
रo 3,400.00
