")
-500x500.png "RGB-D 3D ToF Sensor Camera (Supports ROS1 and ROS2)")
-500x500.png "RGB-D 3D ToF Sensor Camera (Supports ROS1 and ROS2)")
The RGB-D camera is a 3D time-of-flight camera module with RGB capabilities, boasting a resolution of 320×240 and an inertial measurement unit (IMU). It effortlessly acquires all RGB-D data through a USB cable and, when paired with a web-based interface, allows for seamless previewing of depth maps, point cloud data, and real-time colorful 3D rendering. Linux compatibility works out-of-the-box, without the need for additional drivers. It supports both ROS1 and ROS2, offering open integration packages and sample codes. Additionally, a Python SDK is provided, enabling applications such as 3D facial recognition, robotic arm grasping, and SLAM mapping to be developed using the acquired point cloud data.
An integrated, cost-effective, and user-friendly 3D Time-of-Flight (ToF) solution designed specifically for Internet of Things (IoT) applications. This solution encompasses various algorithms that enable distance measurement, multi-zone body positioning sensing, posture detection, posture control, and essential calibration functionalities. These features find wide-ranging applications in numerous fields, including white goods, laser televisions, smart projectors, intelligent lighting, smart parking systems, and home automation facilities.

What is Time-of-Flight (ToF) technology and GB-D 3D ToF Sensor Camera?
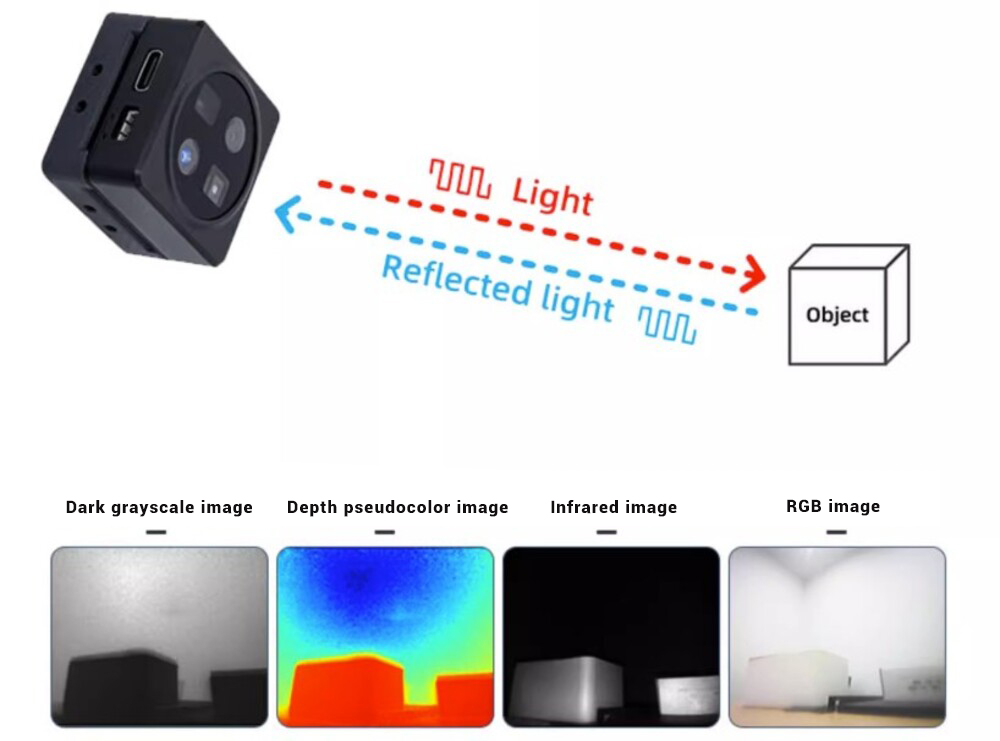
Time-of-Flight technology is a method used for distance measurement. It involves calculating the distance between an emitter and a reflector by measuring the "flight time" of signals such as ultrasonic waves, microwaves, or light.
RGB-D 3D ToF Sensor Camera is a type of camera that combines RGB (Red, Green, Blue) and depth sensors. It is capable of providing both RGB images and depth images. RGB images capture the color information of the scene, while depth images provide the depth information of objects in the scene relative to the camera. ToF sensors are employed for this purpose, with the most commonly used ones being infrared or laser rangefinders. Variations in distance between objects are captured by the module, and these differences are displayed as cooler or warmer colors. The color tones shift with the mapping of distance, with warmer tones (orange-red) representing closer distances and cooler tones (blue) indicating greater distances.
Features:
- High-resolution RGB-D imaging: Detailed depth maps and 3D rendering.
- Seamless compatibility: Linux, ROS1, and ROS2 support.
Specifications:
- Processor: Cortex A7@1.5GHz with 0.4T NPU
- Storage: 128MB RAM &128MB ROM
- Camera Supply Voltage: 5V/0.5A
- Detection distance: 0.2~2m
- Resolution
Depth: 320 x 240@30fps
RGB: 800×600@30fps
- Interface:
UART(1.25mm)
USB2.0(Type-C)
- Display: Web browser: Depth/IR/RGB/Point cloud
- Data channel: USB Virtual network: Web service
- ROS: Support ROS1/ROS2
- FOV
TOF 55°(H) x 72°(V)
TRGB 78°(H)×98°(V)
- SDK: Python SDK and Sample code
- Operating Temperature: -20~+50℃
- Dimension: 36*36*13.5 mm
Applications:
- SLAM and robotic navigation
- Surveillance & security inspection
- People counting & tailgate detection
- VR/AR & gesture recognition
- Autopilot and AGV obstacle avoidance
- 3D modeling
- Dimensions measurement
- Liveness Detection & facial recognition
Documentations:
Package Includes:
- 1 x Serial Cable 1.25mm to 2.54mm 4-Pin
- 1 x USB Type-C
- 1 x Tripod Stand
- 1 x RGB-D Sensor Camera
- 1 x Cooling Fan
RGB-D 3D ToF Sensor Camera (Supports ROS1 and ROS2)
- Product Code:NR-DFR-RGB-D-3D-ToF-Sensor
- Reward Points:155
- Availability:In Stock
- रo 14,955.00
-
रo 13,030.00
- Price in reward points:15510
-
- 2 or more रo 14,890.00
- 5 or more रo 14,500.00
Related Products

GPS + BDS BeiDou Dual Module
GPS + BDS BeiDou Dual Module is a small-size positioning and navigation module based on the AT6558. ..
रo 1,423.00 रo 1,639.00

USB GPS Receiver
This GPS receiver brings much more accurate and faster positioning performance with stronger signal ..
रo 1,100.00 रo 1,267.00

Gravity: GNSS Positioning Module - I2C&UART
Global Navigation Satellite Systems (GNSS) provide critical timing and positioning functions for dev..
रo 1,494.00 रo 1,725.00

A9G GSM/GPRS+GPS Module
A9G is a complete quad-band GSM/GPRS+GPS module based on the RDA8955 chip. The cost reduction of the..
रo 956.00 रo 1,102.00
")
3D ToF Depth Sensor Camera with 1.14 Inch LCD Screen (0.15~1.5m, supports ROS1 and ROS2)
The 3D TOF depth camera is composed of the BL702 and Juyou 100x100 TOF, and is a 3D sensor that can ..
रo 3,575.00 रo 4,119.00
