



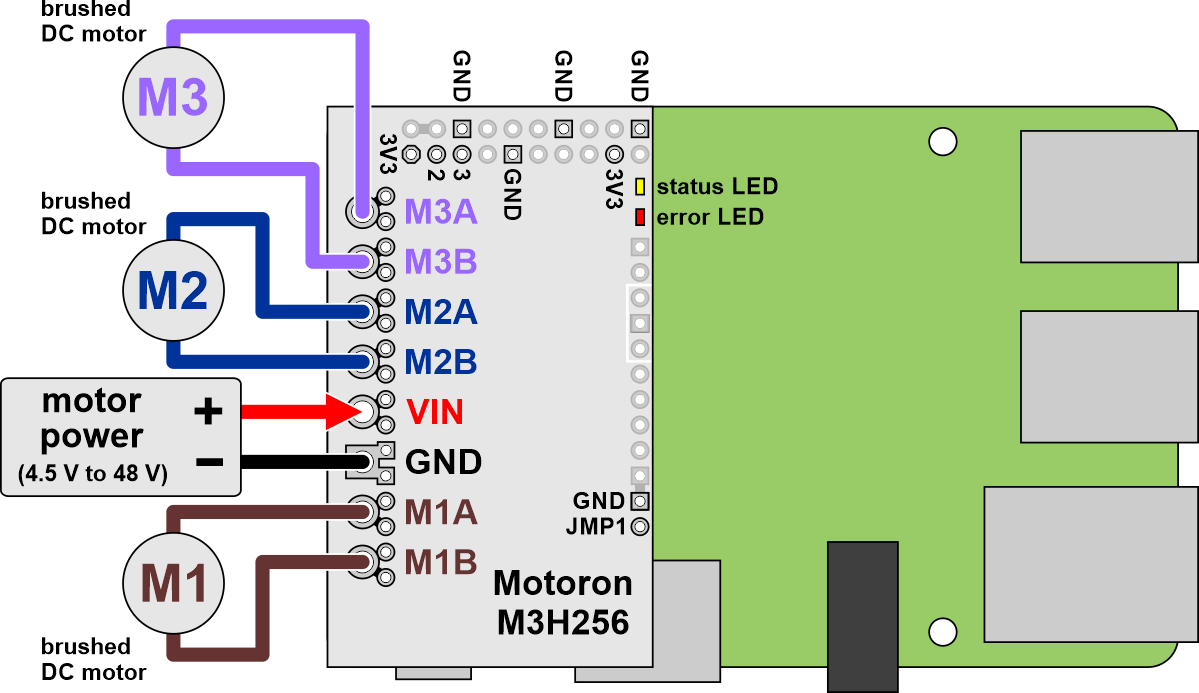
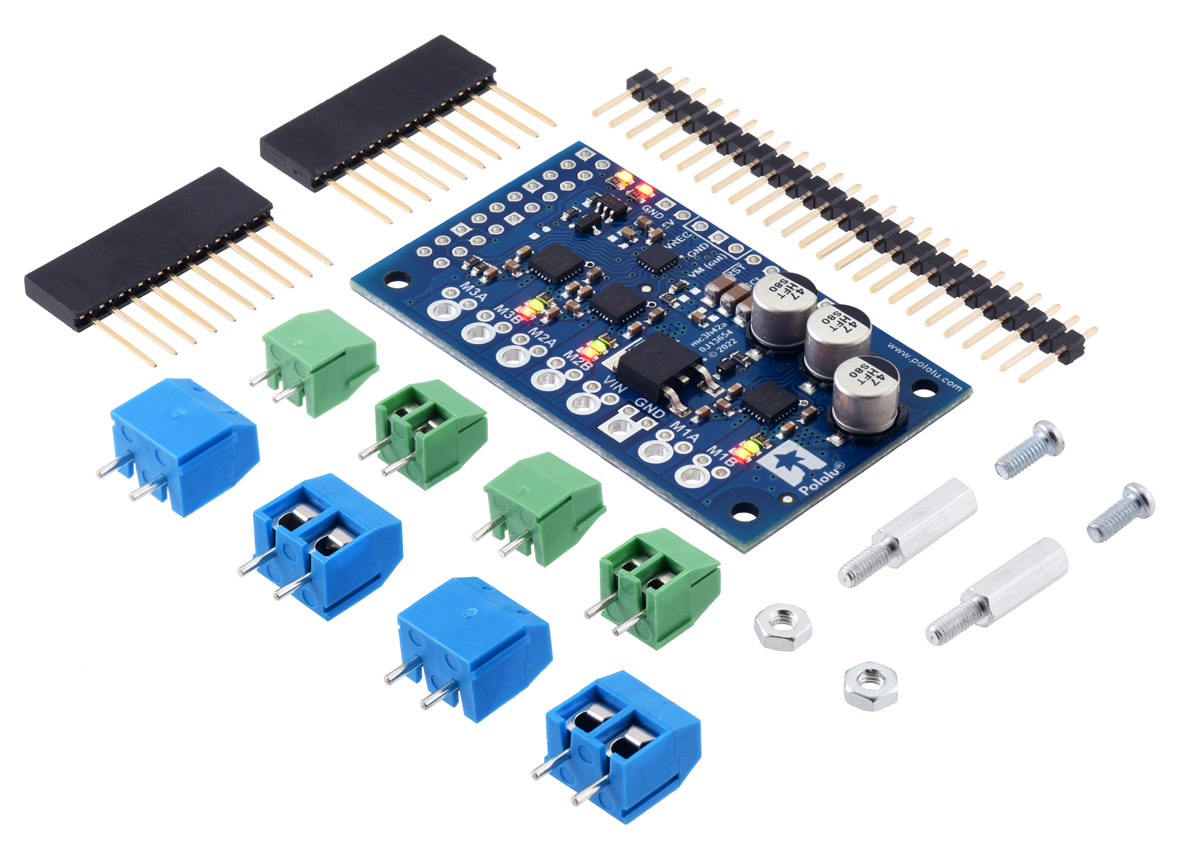
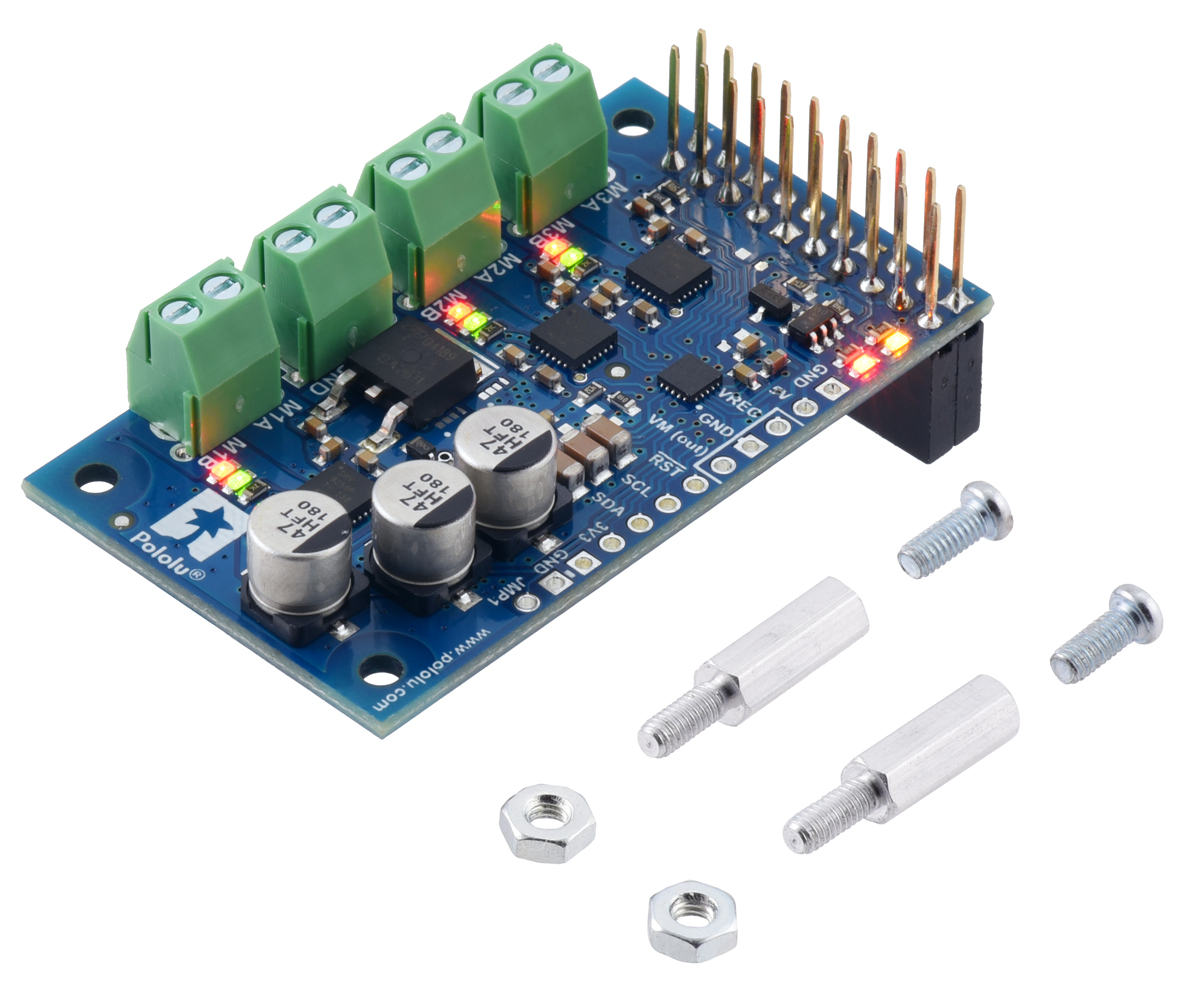
The Motoron M3H256 Triple Motor Controller makes it easy to control DC motors from a Raspberry Pi (Model B+ or newer) through an I²C interface. Each module can independently control up to three motors, and multiple Motoron boards can be stacked on top of the same Raspberry Pi for projects that need to control even more motors. The M3H256 operates from 4.5 V to 48 V and can deliver continuous output currents up to 2 A per motor. This version ships without any header pins, terminal blocks, or mounting hardware included / with a variety of header pin and terminal block options included but not soldered in/ with soldered stackable headers and terminal blocks.
The Motoron M3H256 add-on board makes it easy to control up to three bidirectional, brushed DC motors with a compatible Raspberry Pi (Model B+ or newer). It operates from 4.5 V to 48 V and can deliver continuous output currents up to 2 A per motor. The M3H256 is designed to stack on top of a Raspberry Pi (Model B+ or newer), similar to a HAT (Hardware Attached on Top), and multiple Motoron controllers can be stacked on top of each other, allowing independent control of many motors. Unlike most of our motor drivers and motor driver expansion boards for Raspberry Pi, the Motoron does not require any PWM outputs on your Raspberry Pi. Instead, the Raspberry Pi communicates with the Motoron using I²C, so only two GPIO pins are needed regardless of how many Motorons you connect.
- Three M3H256 versions are available to provide different options for the through-hole connectors:
- For applications using an Arduino or compatible controller, consider the Motoron M3S256 instead (also available with different connector options).
Details For without any header pins, terminal blocks, or mounting hardware included:
Details For with soldered stackable headers and terminal blocks:
Features:
- Features for without any header pins, terminal blocks, or mounting hardware included:
- Three motor control channels allow for independent control of up to three bidirectional brushed DC motors per Motoron
- Maximum output current per motor: 2.0 A continuous, 6.4 A peak for <1 second
- Reverse-voltage protection on motor power supply (down to -40 V)
- Logic voltage range: 2.8 V to 5.5 V
- I²C clock speed: up to 400 kHz
- Optional cyclic redundancy checking (CRC)
- Configurable motion parameters:
- Max acceleration/deceleration forward/reverse
- Starting speed forward/reverse
- Direction change delay forward/reverse
- PWM frequency: eight options available from 1 kHz to 80 kHz
- Command timeout feature stops motors if the Raspberry Pi stops communicating
- Configurable automatic error response
- Motor power supply (VIN) voltage measurement
- Optional pins make it easy to power the Raspberry Pi from reverse-protected motor power through an external regulator (not included)
- Two status LEDs
- Motor direction indicator LEDs
- Motoron Python library simplifies getting started using the Motoron with a Raspberry Pi
- Notes:
- Not recommended for use with 48V batteries.
- Note: Reverse voltage protection only works up to 40 V.
- Features for with a variety of header pin and terminal block options included but not soldered in:
- Three motor control channels allow for independent control of up to three bidirectional brushed DC motors per Motoron.
- Maximum output current per motor: 2.0 A continuous, 6.4 A peak for <1 second
- Reverse-voltage protection on motor power supply (down to -40 V)
- Logic voltage range: 2.8 V to 5.5 V
- I²C clock speed: up to 400 kHz
- Optional cyclic redundancy checking (CRC)
- Configurable motion parameters:
- Max acceleration/deceleration forward/reverse
- Starting speed forward/reverse
- Direction change delay forward/reverse
- PWM frequency: eight options available from 1 kHz to 80 kHz
- Command timeout feature stops motors if the Raspberry Pi stops communicating
- Configurable automatic error response
- Motor power supply (VIN) voltage measurement
- Optional pins make it easy to power the Raspberry Pi from reverse-protected motor power through an external regulator (not included)
- Two status LEDs
- Motor direction indicator LEDs
- Motoron Python library simplifies getting started using the Motoron with a Raspberry Pi
- Notes:
- PCB assembly only, without optional included headers, terminal blocks, or standoffs.
- Not recommended for use with 48V batteries.
- Note: Reverse voltage protection only works up to 40 V.
- Features for with soldered stackable headers and terminal blocks:
- Three motor control channels allow for independent control of up to three bidirectional brushed DC motors per Motoron
- Maximum output current per motor: 2.0 A continuous, 6.4 A peak for <1 second
- Reverse-voltage protection on motor power supply (down to -40 V)
- Logic voltage range: 2.8 V to 5.5 V
- I²C clock speed: up to 400 kHz
- Optional cyclic redundancy checking (CRC)
- Configurable motion parameters:
- Max acceleration/deceleration forward/reverse
- Starting speed forward/reverse
- Direction change delay forward/reverse
- PWM frequency: eight options available from 1 kHz to 80 kHz
- Command timeout feature stops motors if the Raspberry Pi stops communicating
- Configurable automatic error response
- Motor power supply (VIN) voltage measurement
- Optional pins make it easy to power the Raspberry Pi from reverse-protected motor power through an external regulator (not included)
- Two status LEDs
- Motor direction indicator LEDs
- Motoron Python library simplifies getting started using the Motoron with a Raspberry Pi
- Notes:
- Not including standoffs.
- Not recommended for use with 48V batteries.
- Note: Reverse voltage protection only works up to 40 V.
Specifications:
- Specifications for without any header pins, terminal blocks, or mounting hardware included:
- Channels: 3
- Model: Motoron M3H256
- Control interface: I²C
- Minimum operating voltage: 4.5 V
- Maximum operating voltage: 48 V1
- Continuous output current per channel: 2 A
- Peak output current per channel: 6.4 A
- Reverse voltage protection?: Y2
- Connectors soldered?: N
- PCB dev codes: mc3h42a
- Other PCB markings: 0J13654
- Size: 32.5 mm × 56 mm
- Weight: 8.5 g
- Specifications for with a variety of header pin and terminal block options included but not soldered in:
- Channels: 3
- Model: Motoron M3H256
- Control interface: I²C
- Minimum operating voltage: 4.5 V
- Maximum operating voltage: 48 V2
- Continuous output current per channel: 2 A
- Peak output current per channel: 6.4 A
- Reverse voltage protection?: Y3
- Connectors soldered?: N
- PCB dev codes: mc3h42a
- Other PCB markings: 0J13654
- Size: 32.5 mm × 56 mm
- Weight: 8.5 g1
- Specifications for with soldered stackable headers and terminal blocks:
- Channels: 3
- Model: Motoron M3H256
- Control interface: I²C
- Minimum operating voltage: 4.5 V
- Maximum operating voltage: 48 V2
- Continuous output current per channel: 2 A
- Peak output current per channel: 6.4 A
- Reverse voltage protection?: Y3
- Connectors soldered?: Y
- PCB dev codes: mc3h42a
- Other PCB markings: 0J13654
- Size: 32.5 mm × 56 mm
- Weight: 14.5 g1
Documentation:
Package Includes:
- 1 x Pololu 5035/5034/5033 Motoron M3H256 Triple Motor Controller for Raspberry Pi
Pololu 5035/5034/5033 Motoron M3H256 Triple Motor Controller for Raspberry Pi
- Brand: Pololu
- Product Code:NR-Pololu-Motoron-M3H256-Triple
- Reward Points:27
- Availability:In Stock
- रo 2,761.00
-
रo 2,650.00
- Price in reward points:2761
-
- 5 or more रo 2,739.00
- 10 or more रo 2,717.00
- 25 or more रo 2,619.00
- 96 or more रo 2,587.00
Available Options
Related Products

Pololu 5065/5064 Motoron M2T256 Dual I²C Motor Controller
The Motoron M2T256 Dual I²C Motor Controller offers a compact solution for controlling two DC motors..
रo 1,816.00 रo 1,891.00

Pololu 1373 / 1377 / 1381 / 1383 / 1379 Simple High-Power Motor Controller 18V7/ 24V12/ 18V15/ 24V23/ 18V25 Partial kit
The Pololu Simple High-Power Motor Controller makes basic control of brushed DC motors easy, with ou..
रo 12,782.00 रo 13,208.00
")
Pololu 1372 / 1378 / 1376 Simple Motor Controller 18V7/ 24V12/ 18V15 (Fully Assembled)
The Pololu Simple High-Power Motor Controller makes basic control of brushed DC motors easy, with ou..
रo 13,323.00 रo 13,767.00

Pololu 1112 Qik 2s12v10 Dual Serial Motor Controller
This powerful motor controller allows variable speed and direction control of two large, brushed DC ..
रo 14,110.00
")
Pololu 4750 / 4751 / 4752 / 4753 / 4755 / 4756 / 2828 Metal Gearmotors with 64 CPR Encoder (Helical Pinion)
This is the motor and encoder portion of our 37D x L mm metal gearmotors with 64 CPR encoders. It do..
रo 2,499.00 रo 2,603.00

Pololu 3142 / 3143 / 3146 / 3147 / 3148 / 3149 Jrk USB Motor Controller with Feedback
This compact motor controller makes closed-loop speed or position (but not both!) control of a brush..
रo 4,771.00 रo 4,970.00

Pololu 3587 / 3588 MCP263 Dual 60A Advanced Motor Controller
The MCP motor controllers from Basicmicro (formerly Ion Motion Control) can control a pair of brushe..
रo 39,341.00 रo 40,325.00
")
MDV 2x2A DC Motor Controller (L298N)
This is a 4.8-46 V, 2 A Dual Motor Controller which is the revised version of the DF-MDV1.0. Its per..
रo 1,076.00 रo 1,240.00

Pololu 5077 / 5076 Motoron M1U550 Single Serial Motor Controller
The Motoron M1U550 Single I²C Motor Controller offers a compact solution for controlling one DC moto..
रo 947.00 रo 986.00

Pololu 5073 / 5072 / 5071 Motoron M3H550 Triple Motor Controller for Raspberry Pi
The Motoron M3H550 Triple Motor Controller makes it easy to control DC motors from a Raspberry Pi (M..
रo 1,589.00 रo 1,655.00
Tags: Pololu, Motor Controller, Raspberry Pi
