")
")
")
")
These powerful brushed DC gearmotors are available in a variety of different gear ratios. Versions with an integrated quadrature encoder are also available, including just the motor and encoder portion by itself (no gearbox).
|
ated Voltage |
Stall Current |
No-Load Current |
Gear Ratio |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
 Without Encoder |
 With Encoder |
|
|---|---|---|---|---|---|---|---|---|---|
| (kg ⋅ cm) | (oz ⋅ in) | ||||||||
| 12 V | 5.5 A | 0.15 A | 1:1 (no gearbox) | 10,000 | 0.5 | 7 | – | – | item #4750 |
| 19:1 | 540 | 8.5 | 120 | 12 | item #4741 | item #4751 | |||
| 30:1 | 330 | 14 | 190 | 12 | item #4742 | item #4752 | |||
| 50:1 | 200 | 21 | 290 | 10 | item #4743 | item #4753 | |||
| 70:1 | 150 | 27 | 380 | 10 | item #4744 | item #4754 | |||
| 100:1 | 100 | 34 | 470 | 8 | item #4745 | item #4755 | |||
| 131:1 | 76 | 45 | 630 | 6 | item #4746 | item #4756 | |||
| 150:1 | 67 | 49 | 680 | 6 | item #2829 | item #2828 | |||
Details for item #4741:



| voltage | no-load performance | stall extrapolation |
|---|---|---|
| 12 V | 540 RPM, 150 mA |
8.5 kg⋅cm (120 oz⋅in), 5.5 A |
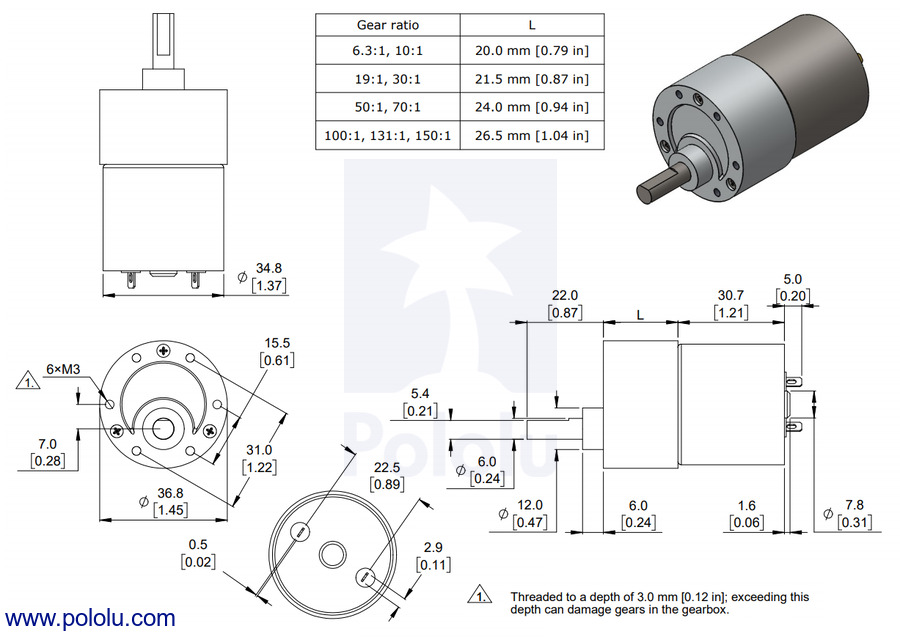



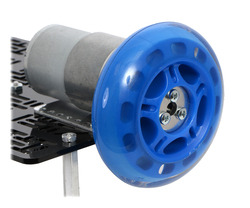




Pololu 4741 / 4742 / 4743 / 4744 / 4745 / 4746 / 2829 Metal Gearmotors without Encoder (Helical Pinion)
- Brand: Pololu
- Product Code:Pololu-Metal-Gearmotor-without-Encoder
- Reward Points:26
- Availability:In Stock
- रo 2,603.00
-
रo 2,499.00
- Price in reward points:2603
-
- 5 or more रo 2,582.00
- 10 or more रo 2,561.00
- 25 or more रo 2,449.00
- 55 or more रo 2,429.00
Available Options
Related Products

Pololu 1084 Stamped Aluminum L-Bracket Pair for 37D mm Metal Gearmotors
These aluminum gearmotor brackets let you mount Pololu’s 37D mm metal gearmotors to your project. Th..
रo 857.00
")
Pololu 4750 / 4751 / 4752 / 4753 / 4755 / 4756 / 2828 Metal Gearmotors with 64 CPR Encoder (Helical Pinion)
This is the motor and encoder portion of our 37D x L mm metal gearmotors with 64 CPR encoders. It do..
रo 2,499.00 रo 2,603.00

Pololu 3081 Magnetic Encoder Pair Kit for Micro Metal Gearmotors
Add quadrature encoders to your micro metal gearmotors (extended back shaft version required) ..
रo 679.00 रo 707.00

Pololu 4747 / 4748 Metal Gearmotor 37Dx50L mm 12V - Helical Pinion
This gearmotor is a powerful brushed DC motor with metal gearbox intended for operation at 12 V. The..
रo 2,499.00 रo 2,603.00

Pololu Motoron 5038/5037/5036 M2S18v18 Dual High-Power Motor Controller Shield for Arduino
The Motoron M2S18v18 Dual High-Power Motor Controller Shield for Arduino makes it easy to control tw..
रo 4,771.00 रo 4,970.00

Pololu 5044/5043/5042 Motoron M2S18v20 Dual High-Power Motor Controller Shield for Arduino
The Motoron M2S18v20 Dual High-Power Motor Controller Shield for Arduino makes it easy to control tw..
रo 9,831.00 रo 10,241.00
Tags: Pololu, Metal, Gearmotor, Helical Pinion
