


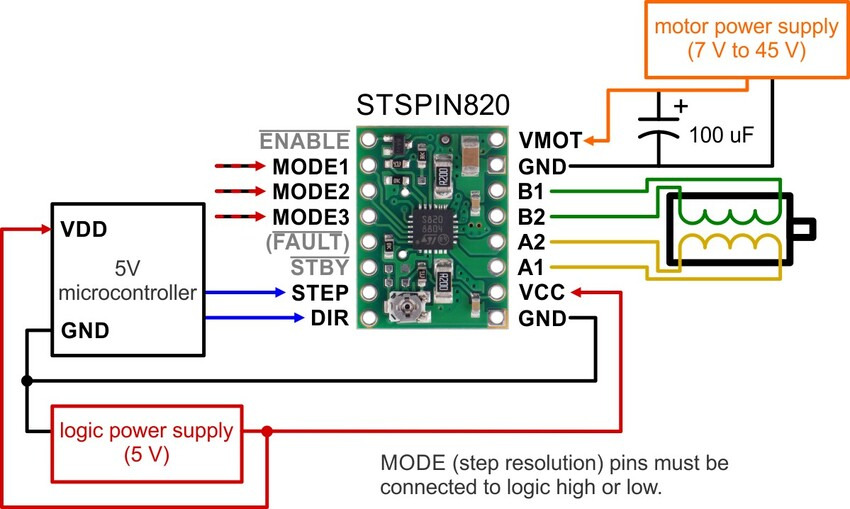
This breakout board for STMicro’s STSPIN820 microstepping bipolar stepper motor driver offers microstepping down to 1/256-step and a wide operating range of 7 V to 45 V. It can deliver up to approximately 0.9 A per phase continuously without a heat sink or forced air flow (up to 1.5 A peak). The module has a pinout and interface that are very similar to that of our popular A4988 carriers, so it can be used as a drop-in replacement for those boards in many applications.
Overview
|
MODE1 |
MODE2 |
MODE3 |
Microstep Resolution |
|
Low |
Low |
Low |
Full step |
|
High |
Low |
Low |
Half step |
|
Low |
High |
Low |
1/4 step |
|
High |
High |
Low |
1/8 step |
|
Low |
Low |
High |
1/16 step |
|
High |
Low |
High |
1/32 step |
|
Low |
High |
High |
1/128 step |
|
High |
High |
High |
1/256 step |
Pololu 2878 / 2879 STSPIN820 Stepper Motor Driver Carrier
- Brand: Pololu
- Product Code: Pololu-STSPIN820-Stepper-Motor-Driver-Carrier
- Reward Points: 16
- Availability: In Stock
- रo 1,595.00
-
रo 1,532.00
- Price in reward points: 1595
-
- 10 or more रo 1,583.00
- 20 or more रo 1,570.00
- 50 or more रo 1,557.00
- 100 or more रo 1,544.00
Available Options
Related Products

Pololu 2134 / 2874 DRV8834 Low-Voltage Stepper Motor Driver Carrier
This is a breakout board for TI’s DRV8834 microstepping bipolar stepper motor driver. It has a pinou..
रo 602.00 रo 628.00

Pololu 1212 MC33926 Motor Driver Carrier
This breakout board for Freescale’s MC33926 full H-bridge has an operating range of 5 – 28 V and can..
रo 1,512.00 रo 1,575.00

Pololu 2130 DRV8833 Dual Motor Driver Carrier
This tiny breakout board for TI’s DRV8833 dual motor driver can deliver 1.2 A per channel continuous..
रo 754.00 रo 786.00

Pololu 2135 DRV8835 Dual Motor Driver Carrier
This tiny breakout board for TI’s DRV8835 dual motor driver can deliver 1.2 A per channel conti..
रo 376.00 रo 391.00

Pololu 2137 A4990 Dual Motor Driver Carrier
This compact breakout board makes it easy to use Allegro’s A4990 dual motor driver, which can contro..
रo 608.00 रo 633.00

Pololu 2999 TB67H420FTG Dual/Single Motor Driver Carrier
The TB67H420FTG from Toshiba is an H-bridge motor driver IC that can be used for bidirectional contr..
रo 793.00 रo 944.00

Pololu 2973 / 2974 / 2998 Stepper Motor Driver Carrier TB67S249FTG/ TB67S279FTG/ TB67S128FTG
This breakout board makes it easy to use Toshiba’s TB67S249FTG/ TB67S279FTG microstepping bipolar st..
रo 967.00 रo 1,008.00

Pololu 707/708 VNH2SP30/VNH3SP30 Dual Motor Driver Carrier MD03A 708 707
The Pololu dual high-power motor drivers are compact carriers for the VNH3SP30 and VNH2SP30 motor dr..
रo 14,932.00 रo 17,634.00

Pololu 3098 / 3099 Stepper Motor Driver Compact Carrier TB67S279FTG
This breakout board for Toshiba’s TB67S279FTG microstepping bipoloar stepper motor driver is arrange..
रo 816.00 रo 850.00

Pololu 3096 / 3097 Stepper Motor Driver Compact Carrier TB67S249FTG
This breakout board for Toshiba’s TB67S249FTG microstepping bipoloar stepper motor driver is arrange..
रo 982.00 रo 1,023.00

Pololu 2876 / 2877 STSPIN220 Low-Voltage Stepper Motor Driver Carrier
This breakout board for STMicro’s STSPIN220 low-voltage microstepping bipolar stepper motor driver o..
रo 602.00 रo 628.00

Smart Electronics Kits NE555+CD4017 Light LED Module DIY Kit
Specification : Board size : 53mm*19mm Supply Voltage : 2.5 - 14 .5 ..
रo 85.00

Pololu 3138 / 3139 Tic T249 USB Multi-Interface Stepper Motor Controller
The Tic T249 USB Multi-Interface Stepper Motor Controller makes basic control of a stepper motor eas..
रo 3,787.00 रo 3,945.00

Pololu 3730 High-Power Stepper Motor Driver 36v4
This discrete MOSFET stepper motor driver enables control of one bipolar stepper motor. It supports ..
रo 2,271.00 रo 2,365.00

Pololu 2133 / 2982 DRV8825 Stepper Motor Driver Carrier, High Current
This breakout board for TI’s DRV8825 microstepping bipolar stepper motor driver features adjustable ..
रo 1,286.00 रo 1,339.00

Pololu 3731 High-Power Stepper Motor Driver 36v8
This discrete MOSFET stepper motor driver enables control of one bipolar stepper motor. It supports ..
रo 2,650.00 रo 2,761.00
